PRODUSCTS

PRODUSCTS
PRODUSCTS
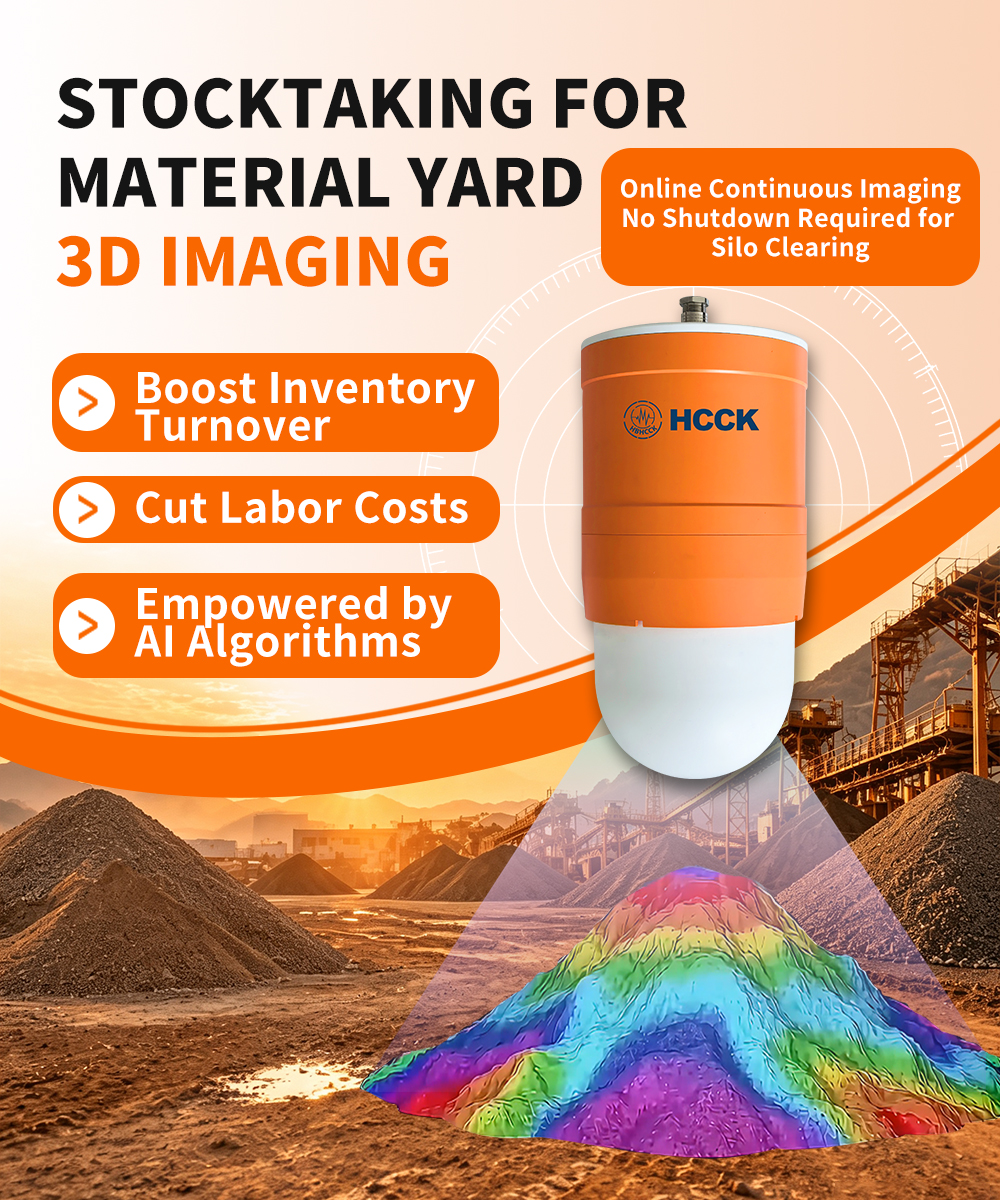




Millimeter-Wave 3D Scanner HCDAR-3D
360° Full Coverage + Pan-Tilt Dual-Axis Omni-Directional Scanning
3D Visualization System
Continuous online imaging to support streamlined lean production
No shutdown required for silo cleaning
Dust & moisture resistant
Cut labor costs and safeguard worker safety
Layered density measurement / Zonal density measurement
High-precision measurement empowered by AI algorithms
Accelerate inventory turnover and reduce capital occupancy
Supports inventory analysis
production traceability management and other workflows














South of Puhui Street, west of Guangsheng East Road, High tech Zone, Fengnan District, Tangshan City, Hebei Province





Technical support:

Tips
Submitted successfully
Back Index